Rack And Pinion Gear Design With Formula Free Download. Chapter racks helical m 1 5 za 30 m 2 za 31 m 3 za 32 m 4 za 33 m 5 za 34 m 6 za 35 m 8 za 36 m 10 za 37 m 12 za 38 racks straight m 1 zb 36 m 1 5 zb 37 m 2 zb 38 m 2 5 zb 39 m 3 zb 40 m 4 zb 41 m 5 zb 42 m 6 zb 43 m 8 zb 44 m 10 zb 45 m 12 zb 46 integrated racks m 2 zc 15 m 3 zc 16 m 4 zc 17 p 5 mm zc 18 p 10 mm zc 19 p 13 33 mm zc 20. A rack and pinion is a type of linear actuator that comprises a pair of gears which convert rotational motion into linear motion.
Generally gear rack and pinion are collectively called rack and pinion. Rack and pinion design is based on beam strength and wear strength. N v n v v 19100 d rpm.
Chapter racks helical m 1 5 za 30 m 2 za 31 m 3 za 32 m 4 za 33 m 5 za 34 m 6 za 35 m 8 za 36 m 10 za 37 m 12 za 38 racks straight m 1 zb 36 m 1 5 zb 37 m 2 zb 38 m 2 5 zb 39 m 3 zb 40 m 4 zb 41 m 5 zb 42 m 6 zb 43 m 8 zb 44 m 10 zb 45 m 12 zb 46 integrated racks m 2 zc 15 m 3 zc 16 m 4 zc 17 p 5 mm zc 18 p 10 mm zc 19 p 13 33 mm zc 20.
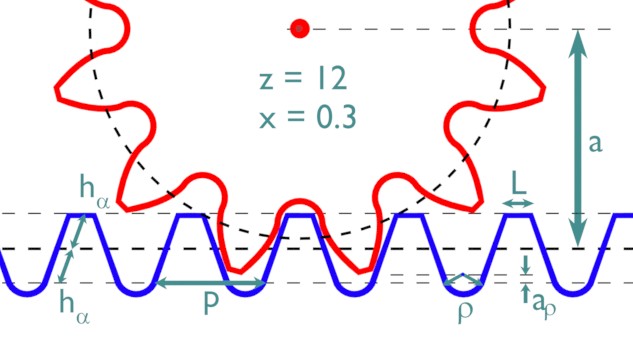
5164 ashwin chopane et al materials today. In the example above the12 tooth pinion was given sufficient correction to prevent undercut and the residual profile shift was given to the mating gear. Basic rack and. S b formulas v t m s 2 v t m s 2 tangential force.
